
Provable Safe Reinforcement Learning with Binary Feedback Andrew Bennett Cornell University
2025-05-02
0
0
608.58KB
28 页
10玖币
侵权投诉
Provable Safe Reinforcement Learning with Binary Feedback
Andrew Bennett
Cornell University
awb222@cornell.edu
Dipendra Misra
Microsoft Research
dimisra@microsoft.com
Nathan Kallus
Cornell University
kallus@cornell.edu
October 2022
Abstract
Safety is a crucial necessity in many applications of reinforcement learning (RL), whether robotic,
automotive, or medical. Many existing approaches to safe RL rely on receiving numeric safety feedback,
but in many cases this feedback can only take binary values; that is, whether an action in a given
state is safe or unsafe. This is particularly true when feedback comes from human experts. We therefore
consider the problem of provable safe RL when given access to an offline oracle providing binary feedback
on the safety of state, action pairs. We provide a novel meta algorithm, SABRE, which can be applied
to any MDP setting given access to a blackbox PAC RL algorithm for that setting. SABRE applies
concepts from active learning to reinforcement learning to provably control the number of queries to the
safety oracle. SABRE works by iteratively exploring the state space to find regions where the agent is
currently uncertain about safety. Our main theoretical results shows that, under appropriate technical
assumptions, SABRE never takes unsafe actions during training, and is guaranteed to return a near-
optimal safe policy with high probability. We provide a discussion of how our meta-algorithm may be
applied to various settings studied in both theoretical and empirical frameworks.
1 Introduction
Reinforcement learning (RL) is an important paradigm that can be used to solve important dynamic decision-
making problems in a diverse set of fields, such as robotics, transportation, healthcare, and user assistance.
In recent years there has been a significant increase in interest in this problem, with many proposed solutions.
However, in many such applications there are important safety considerations that are difficult to address
with existing techniques.
Consider the running example of a cleaning robot, whose task is to learn how to vacuum the floor of a
house. The primary goal of the robot, of course, is to learn to vacuum as efficiently as possible, which may be
measured by the amount cleaned in a given time. However, we would also like to impose safety constraints
on the robot’s actions; for example, the robot shouldn’t roll off of a staircase where it could damage itself,
it shouldn’t roll over electrical cords, or it shouldn’t vacuum up the owner’s possessions. In this example,
there are several desirable properties we would like a safety-aware learning algorithm to have, including:
1. The agent should avoid taking any unsafe actions, even during training
2. Since it is hard to concretely define a safety function from the robot’s sensory observations a priori,
we would like the agent to learn a safety function given feedback of observed states
3. Since the notion of safety is human-defined, and we would like the safety feedback to be manually
provided by humans (e.g. the owner), we would want the agent to ask for as little feedback as possible
4. We would like to use binary feedback (i.e. is an action in a given state safe or unsafe) rather than
numeric feedback, as this is more natural for humans to provide
5. Since the agent may need to act in real time without direct intervention, they should only ask for
feedback offline in between episodes
1
arXiv:2210.14492v1 [cs.LG] 26 Oct 2022

Moving away from our specific example, the above five properties would be ideal for safe RL in many
applications where safety is naturally human-defined. Unfortunately, there are no existing safe RL methods
that can provably satisfy all of these properties. In particular, existing safe RL methods all fail to satisfy
these properties for at least one of the following reasons: (1) they assume a safety function is fully known
(e.g. Chow et al., 2018; Sim˜ao et al., 2021); (2) they learn safety using numeric feedback (e.g. Wachi and
Sui, 2020; Amani et al., 2021); or (3) they require a human-in-the-loop who can intervene and monitors the
safety of every action taken in real time (Saunders et al., 2018). In addition, none of these existing methods
address the issue of only asking for minimal feedback, which is an important consideration which places the
problem at the interface of RL and active learning.
In this paper, we present a novel safe RL framework encompassing the above concerns, involving an
offline safety-labeling oracle that can provide binary feedback on the safety of state, action pairs in between
episodes. We provide a meta algorithm, SABRE, which can be applied to any MDP class within this
safety framework, given a blackbox RL algorithm for the MDP class. This algorithm utilizes ideas from
disagreement-based active learning, by iteratively exploring the state space to find all regions where there is
disagreement on possible safety. Under some appropriate technical assumptions, including that the blackox
RL algorithm can provably optimize any given reward, SABRE will satisfy all of the above five properties,
and will return an approximately optimal safe policy with high probability. Importantly, we provide high-
probability bounds on the number of samples and calls to the labeling oracle needed, and show that they
are both polynomial, and that the latter is lower order than the former. Finally, we provide some discussion
of how this meta-algorithm approach may be applied in various settings of both theoretical and practical
interest.
Math Notation For any natural number n∈N, we let [n] denote the set {1,2,··· , n}. For any countable
set X, we let ∆(X) denote the space of all probability distributions over X. Given sets Xand Y, we let
X → Y denote the set of all functions from Xto Y. Lastly, sign(y) denotes the sign function which takes a
value of 1 if y > 0, a value of 0 at y= 0, and −1 if y < 0.
2 Problem Setup
Markov Decision Process We consider learning in finite-horizon Markov decision processes (MDPs). A
reward-free MDP is characterized by a tuple (S,A, T, µ, H), where Sis a given (potentially infinitely large)
state space, Ais a finite action space with |A| =A,T:S ×A → ∆(S) is a transition operator, µ∈∆(S) is
an initial state distribution, and H∈Nis the horizon. An MDP (with reward) is a tuple (S,A, T, R, µ, H),
where R:S×A → [0,1] is the reward function. We assume that the transition operator and reward function
are time homogeneous; i.e.,Tand Rdo not depend explicitly on the time index.1We will let (M, R) refer
to the MDP we are learning in, where Mis the corresponding reward-free MDP.
The agent interacts with an MDP over a series of rounds. In each round the agent successively takes
actions according to some policy, which is a mapping from states to actions, in order to generate an episode.
Specifically, in the n’th round for each n∈N, the agent selects some policy πn∈ S → ∆(A), which it then
uses in order to generate an episode τn= (sn
1, an
1, rn
1, . . . , sn
H, an
H, rn
H, sn
H+1), where sn
1∼µ(·), and for each
h∈[H] we have an
h∼πn(· | sn
h), rn
h=R(sn
h, an
h), and sn
h+1 ∼T(· | sn
h, an
h).
For any given policy π, we let Eπ[·] and Pπ(·) denote the expectation and probability operators over
trajectories generated using πin the MDP (M, R). Also, for any policy π, we define the value function
Vπ∈ S → Raccording to Vπ(s) = Eπ[PH
h=1 R(sh, ah)|s1=s], and we similarly define the value of the
policy according to V(π) = Es∼µ(·)[Vπ(s)].
Our main metric of success for reinforcement learning is suboptimality (SubOpt). For any policy class
Π⊆ S → ∆(A) and any policy ˆπ∈Π, we define SubOpt(ˆπ; Π) = supπ∈ΠV(π)−V(ˆπ). Then, one of our
primary goals is to learn a policy ˆπthat has low suboptimality with respect to a given set of policies that it
must choose from, in a relatively small number of episodes.
Over the past few decades, many reinforcement learning algorithms have been developed that can provably
obtain low suboptimality using a small number of episodes, for various classes of MDPs . Our focus is on
adapting such RL algorithms, in order to additionally take into account safety considerations. For these
1This is w.l.o.g. since we can always include the current time index in the observation definition.
2

-1.0 -0.5 0.5 1.0
-1.5
-1.0
-0.5
0.5
1.0
Region of
disagreement
-1.0 -0.5 0.5 1.0
-1.5
-1.0
-0.5
0.5
1.0
Region of
disagreement
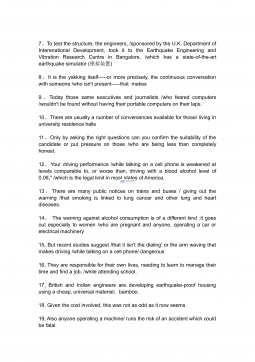
Figure 1: Illustrating the challenge with binary safety feedback. Left: we observe binary safe/unsafe labels
(our setting) and we know the safety function is a halfspace; the safety of state-action pairs in the region of
disagreement (shaded gold region) is uncertain, as there exist halfspaces consistent with both the observed
data and these being either safe or unsafe. Right: we observe noisy numeric safety values (positive being
safe) and we know their mean is linear; the region of disagreement (using 95% confidence) is far smaller
because we can extrapolate to yet-unseen state-action pairs.
reasons, we take a meta-learning approach, and assume access to a blackbox reinforcement learning algorithm
Alg. We formalize this as follows:
Assumption 1. We have access to a blackbox RL algorithm Alg for a set of reward-free MDPs Mthat
contains M. Specifically, given any reward function R0:S × A → [0,1] and policy class Πas input, along
with any , δ ∈(0,1),Alg(R0,Π, , δ)returns a policy ˆπ∈Πsuch that SubOpt(ˆπ; Π) ≤with probability at
least 1−δ. Furthermore, it is guaranteed to do so after at most nAlg(, δ)episodes, for some nAlg(, δ) =
Poly(, log(1/δ)), while only following policies in Π.
We refer to nAlg(, δ) as the sample complexity of Alg, and note that it implicitly depends on the time
horizon H. We also note that the requirement that Alg only follows policies in Π is important, as in practice
we will call Alg using classes of policies that are guaranteed to be safe.
Safety Considerations In addition to the general MDP setup presented above, we would also like to take
safety considerations into account. Specifically, we will use a binary notion of safety as follows: we assume
there exists a function f?:S → {±1}such that f?(s, a) = 1 means that taking action ain state sis safe,
and otherwise action ain state sis unsafe. Importantly, we assume that the safety function f?is unknown,
and we require the agent to only take actions ain states ssuch that f?(s, a) = 1, even during training. That
is, the agent must learn the safety relation, while simultaneously maintaining safety.
The assumption that the safety values are binary is in contrast to most of the literature, which mostly
assumes that these values are numeric (i.e. takes values in Rrather than {±1}, with safety given by
sign(f?(s, a)); see Section 5 for a detailed discussion). To see why this makes the problem more challenging,
consider for example the example displayed in Figure 1. In this example, we consider the case where S=R,
and the safety function is assumed to be linear. On the left we display a series of observed binary safety
values for some fixed action, and on the right we display the corresponding observations when the safety
values are numeric. In each case, we shade in gold the disagreement region where we are unsure about
safety values. With the numeric observations, we can be sure of safety for almost all states except near the
f?(s, a) = 0 margin, whereas with the binary observations we are unsure of safety for all states in between
the two observed clusters. Note that this is true even though the numeric observations have noise, while
the binary ones don’t. In other words, when we receive binary safety feedback, we cannot easily extrapolate
safety beyond the observed states.
In order to make the task of learning given these safety constraints feasible, we model f?using some
class F ⊆ S × A → {±1}of candidate safety functions. This allows us to ensure that f?is learnable, by
using a sufficiently well-behaved class F. In particular, in our theory we will focus on classes Fwith finite
Vapnik-Chervonenkis (VC) dimension (Dudley, 1987). Then, in order to make it feasible to guarantee safety
during training, we make the following core assumption on the setting.
3
Assumption 2. The safety class Fis correctly specified; that is, f?∈ F. Furthermore, there exists a policy
πsafe ∈Πthat is known to always take safe actions.
To explain the importance of this assumption, let us define the set of safe policies corresponding to each
f∈ F, by
Πsafe(f) = {πsafe}∪{π∈Π : f(s, π(s)) = 1 a.s. ∀s∈ S}.
That is Πsafe(f) is the set of all policies that would be safe if fwas the true safety function, along with the
known safe policy. We similarly define the shorthand Πsafe = Πsafe(f?) for the actual set of safe policies.
Then, the assumption that Fis correctly specified allows us to reason about which policies are safe, since if
π∈Πsafe(f) for all possible f∈ F that are consistent with our observations so far, we are guaranteed that
π∈Πsafe. Furthermore, the existence of a known safe policy Πsafe allows the agent to avoid getting stuck
with no known safe action to perform. Note that the definition of πsafe could be problem dependent. For
example, in the previous cleaning robot example, the policy that always takes the “don’t move” action could
qualify. Alternatively, in different applications, πsafe could be defined for example by taking a special action
that terminates the episode early, or has an expert take control.
Obtaining Safety Feedback A key motivation behind using binary safety feedback rather than continu-
ous is for applications where safety is human-defined. In such applications, obtaining safety labels for (s, a)
pairs may be expensive or otherwise burdensome. This motivates an active learning-style approach to the
problem, where we have to explicitly ask for labels of (s, a) pairs, with an additional goal of minimizing the
number of times we do so.
Concretely, our model for the labeling process is as follows. We assume access to a labeling oracle, which
can be given (s, a) pairs and returns the corresponding values of f?(s, a). We assume that this oracle can
be queried an unlimited number of times in between episodes, and that it can only be queried with states
sthat have been previously observed. The reason for the latter restriction is that in many applications the
state corresponds to some kind of observation of the environment, such as an image, and therefore the total
space of states Sis not a-priori known.
Problem Setup Summary. Given a class of MDPs M, a policy class Π, a blackbox RL algorithm Alg,
a safety function class F, a desired sub-optimality , and failure probability δ, we want to propose an online
learning algorithm that, for any unknown M∈ M and f?∈ F, interacts with the MDP over Nrounds and
returns a policy ˆπ∈Π such that, with probability at least 1 −δ, we have:
1. SubOpt(ˆπ; Π) ≤(ˆπis approximately optimal)
2. ˆπ∈Πsafe (the returned policy is safe)
3. f?(sn
h, an
h) = 1 for all h∈[H] and n∈[N] (the agent never takes unsafe actions during training)
In addition, we would like to establish sample-complexity bounds on the number of episodes Nneeded to
ensure the above, in terms of 1/, log(1/δ), H, and nAlg(·). Finally, we would like to establish corresponding
high-probability bounds on the total number of calls to the labelling oracle, which are lower order than the
total sample complexity.
3 Learning Safety via Active Learning in Reinforcement Learning
First, we establish some basic definitions and a result that will form the basis for safety learning. For any
safety-labeled dataset Dconsisting of (s, a, f?(s, a)) tuples, we define the corresponding version space of
safety functions consistent with Dby
V(D) = {f∈ F :f(s, a) = c∀(s, a, c)∈ D}.
Similarly, for any given a∈ A, we can define the corresponding region of disagreement of states where safety
of that action is not known given Dby
RDa(D) = {s:∃f, f 0∈ V(D) s.t. f(s, a)6=f0(s, a)}.
4

Algorithm 1 SAfe Binary-feedback REinforcement learning (SABRE)
Input: Number of epochs N, number of iterations per epoch B, number of rollouts per batch m, accuracy
parameters explore and R, and probability parameters δexplore and δR, initial safety-labeled dataset D(B)
0
(optional)
Output: Final policy ˆπ
1: for n= 1,2, . . . , N do
2: Πn←Π(D(B)
n−1)// define a safe policy class for the current safety labeled dataset D(B)
n−1
3: D(0)
n← D(B)
n−1
4: for i= 1,2, . . . , B do
5: e
R(i)
n(·)←1{∃a∈ A :· ∈ RDa(D(i−1)
n)}// safety reward that incentivizes visiting RD
6: ˆπ(i)
n←Alg(e
R(i)
n,Πn, explore, δexplore)// call blackbox RL method with safety exploration reward
7: Roll out with ˆπ(i)
nfor mepisodes, and collect all observed states in S(i)
n
8: Expand D(i−1)
nto D(i)
nby labelling all s∈ S(i)
nand a∈ A such that s∈RDa(D(i−1)
n)
9: return Alg(R, Π(D(B)
N), R, δR)// return a safe policy by optimizing the environment reward R
Note that these are both standard definitions in disagreement-based active learning (Hanneke, 2014).
Next, define the set of policies known to surely be safe given Das follows:
Π(D) = \
f∈V(D)
Πsafe(f).
Note that given Assumption 2, Π(D) is always ensured to be non-empty, as it will at least contain πsafe.
Given these definitions, we have the following lemma.
Lemma 1. For any safety labeled dataset D, let
U(D) = sup
π∈Πsafe
Pπ(∃h∈[H], a ∈ A :sh∈RDa(D)) .
Then, for any Dand ˆπ∈Π(D), we have
SubOpt(ˆπ; Πsafe)≤SubOpt(ˆπ; Π(D)) + HU (D).
3.1 Challenges with a Naive Approach
This lemma in fact suggests a rather simple, naive approach, based on greedily trying to follow the blackbox
RL algorithm, and switching to πsafe and querying the safety oracle whenever we reach a state where safety
is not known. Before we outline our novel solution that addresses the challenges outlined in the previous
section, we consider the limitations of this naive approach.
Given Lemma 1 and Assumption 1, we can easily ensure sub-optimality of at most +HU(D) for any
target using a naive approach like above, where Dis the labeled dataset incidentally collected following
this approach. However, since this approach does nothing explicit to try to learn the safety and shrink the
region of disagreement, it is difficult to provide any guarantees on how fast U(D) shrinks.
A second issue is that this approach provides no control on the number of calls to the labelling oracle.
Existing analyses from disagreement-based active learning provide bounds on the number of samples needed
to shrink regions of disagreement under fixed distributions, but the agent may roll out with a different
distribution every episode.
3.2 The SABRE Algorithm
Motivated by Lemma 1, as well as the limitations of the above naive baseline approach, we now present our
novel algorithm in Algorithm 1. This algorithm is superficially similar to the baseline approach, in the sense
that it builds a labeled dataset Dover a series of rounds, and then estimates an optimal policy following
5

摘要:
展开>>
收起<<
ProvableSafeReinforcementLearningwithBinaryFeedbackAndrewBennettCornellUniversityawb222@cornell.eduDipendraMisraMicrosoftResearchdimisra@microsoft.comNathanKallusCornellUniversitykallus@cornell.eduOctober2022AbstractSafetyisacrucialnecessityinmanyapplicationsofreinforcementlearning(RL),whetherroboti...
声明:本站为文档C2C交易模式,即用户上传的文档直接被用户下载,本站只是中间服务平台,本站所有文档下载所得的收益归上传人(含作者)所有。玖贝云文库仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对上载内容本身不做任何修改或编辑。若文档所含内容侵犯了您的版权或隐私,请立即通知玖贝云文库,我们立即给予删除!
相关推荐
-
政治理论应知应会 100 题VIP免费
 2024-12-12 394
2024-12-12 394 -
2025年中央机关及其直属机构录用公务员考试 行政职业能力测验(地市级)(经典模考卷三)解析VIP免费
 2024-12-12 49
2024-12-12 49 -
021水平面内的圆周运动(圆锥摆模型)及其临界问题 精讲精练-2022届高三物理一轮复习疑难突破微专题VIP免费
 2025-01-04 48
2025-01-04 48 -
21学位英语:从句考点真题VIP免费
 2025-04-08 7
2025-04-08 7 -
19学位英语:2010年阅读理解分析VIP免费
 2025-04-08 4
2025-04-08 4 -
[16] 学位英语:2007年阅读理解分析VIP免费
 2025-04-08 5
2025-04-08 5 -
[15] 学位英语:2006年阅读理解分析VIP免费
 2025-04-08 11
2025-04-08 11 -
[14] 学位英语:2005年阅读理解分析VIP免费
 2025-04-08 13
2025-04-08 13 -
[13] 学位英语:2004年阅读理解分析VIP免费
 2025-04-08 10
2025-04-08 10 -
[10] 学位英语:长难句拆分(二)VIP免费
 2025-04-08 11
2025-04-08 11
分类:图书资源
价格:10玖币
属性:28 页
大小:608.58KB
格式:PDF
时间:2025-05-02
作者详情


相关内容
-
[16] 学位英语:2007年阅读理解分析
分类:高等教育
时间:2025-04-08
标签:无
格式:DOC
价格:5.9 玖币
-
[15] 学位英语:2006年阅读理解分析
分类:高等教育
时间:2025-04-08
标签:无
格式:DOC
价格:5.9 玖币
-
[14] 学位英语:2005年阅读理解分析
分类:高等教育
时间:2025-04-08
标签:无
格式:DOC
价格:5.9 玖币
-
[13] 学位英语:2004年阅读理解分析
分类:高等教育
时间:2025-04-08
标签:无
格式:DOC
价格:5.9 玖币
-
[10] 学位英语:长难句拆分(二)
分类:高等教育
时间:2025-04-08
标签:无
格式:DOC
价格:5.9 玖币

