Isometric 3D Adversarial Examples in the Physical World Yibo Miao1 Yinpeng Dong23y Jun Zhu2345 Xiao-Shan Gao1y
2025-05-05
0
0
2.99MB
22 页
10玖币
侵权投诉

Isometric 3D Adversarial Examples in the
Physical World
Yibo Miao1, Yinpeng Dong2,3†, Jun Zhu2,3,4,5, Xiao-Shan Gao1†
1KLMM, UCAS, Academy of Mathematics and Systems Science,
Chinese Academy of Sciences, Beijing 100190, China
2Dept. of Comp. Sci. & Tech., Institute for AI, Tsinghua-Bosch Joint ML Center,
THBI Lab, BNRist Center, Tsinghua University, Beijing 100084, China
3RealAI 4Peng Cheng Laboratory 5Pazhou Laboratory (Huangpu), Guangzhou, China
yibomiao21@163.com, {dongyinpeng, dcszj}@tsinghua.edu.cn, xgao@mmrc.iss.ac.cn
Abstract
3D deep learning models are shown to be as vulnerable to adversarial examples
as 2D models. However, existing attack methods are still far from stealthy and
suffer from severe performance degradation in the physical world. Although 3D
data is highly structured, it is difficult to bound the perturbations with simple
metrics in the Euclidean space. In this paper, we propose a novel
-isometric (
-
ISO) attack to generate natural and robust 3D adversarial examples in the physical
world by considering the geometric properties of 3D objects and the invariance to
physical transformations. For naturalness, we constrain the adversarial example
to be
-isometric to the original one by adopting the Gaussian curvature as a
surrogate metric guaranteed by a theoretical analysis. For invariance to physical
transformations, we propose a maxima over transformation (MaxOT) method that
actively searches for the most harmful transformations rather than random ones
to make the generated adversarial example more robust in the physical world.
Experiments on typical point cloud recognition models validate that our approach
can significantly improve the attack success rate and naturalness of the generated
3D adversarial examples than the state-of-the-art attack methods.
1 Introduction
Deep neural networks (DNNs) have achieved unprecedented performance on numerous tasks, in-
cluding 2D image classification [
33
,
25
,
27
] and 3D point cloud recognition [
49
,
50
,
69
]. However,
DNNs are vulnerable to adversarial examples [
60
,
20
] — inputs crafted by adding imperceptible
perturbations to original examples that can cause misclassification of the victim model. Adversarial
examples are prevalent in various domains beyond images, including texts [
28
], speeches [
85
] and
3D objects [
74
]. As deep 3D point cloud recognition has been adopted in safety-critical applications,
such as autonomous driving [
5
,
86
], robotics [
66
,
95
], medical image processing [
61
], it has garnered
increasing attention to studying the adversarial robustness of 3D point cloud recognition models [
6
].
However, the existing adversarial attacks on point cloud recognition models are still far from stealthy
and suffer from drastic performance degeneration in the physical world. There is usually a trade-off
between the stealthiness and the real-world attacking performance, making it challenging to achieve
the best of both worlds. Early methods [
80
,
74
,
43
] adopt gradient-based attacks to add, remove, and
modify points, but they are limited to digital-world attacks. The KNN attack [
64
] and the
GeoA3
attack [
70
] constrain the smoothness of the adversarial point clouds and reconstruct adversarial
†Corresponding authors.
36th Conference on Neural Information Processing Systems (NeurIPS 2022).
arXiv:2210.15291v1 [cs.CV] 27 Oct 2022

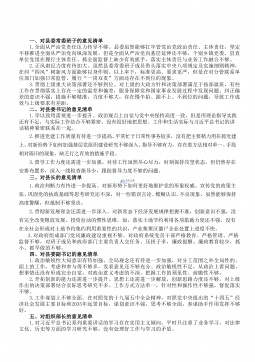
Original KNN Geo3Mesh Attack -ISO
Figure 1: An illustration of adversarial objects crafted by KNN attack [
64
],
GeoA3
attack [
70
], Mesh Attack [
89
]
and our
-ISO attack against the PointNet model: KNN attack and
GeoA3
attack can produce unnatural
adversarial objects (and often low success rates); Mesh Attack can generate a lot of distortions; while
-ISO
attack improves the naturalness of the 3D adversarial sample and ensures the consistency between the intrinsic
geometric properties of the adversarial and original 3D objects [8].
meshes from the point clouds that can be 3D-printed in the physical world. Although these works
demonstrate successful physical attacks, point cloud reconstruction introduces large noises and errors,
resulting in low attack success rates and unnaturalness of the adversarial objects in the physical
world. Mesh Attack [
89
] is recently proposed to perturb the mesh representation of 3D objects,
which improves the success rate but often creates large distortions that can be easily detected by
humans as anomalies, as illustrated in Fig. 1. Overall, it is difficult to achieve both the naturalness
and effectiveness of 3D adversarial attacks in the physical world, which we think is largely due to the
lack of an appropriate metric to characterize the naturalness of 3D data.
To address these issues, we propose an
-isometric (
-ISO
) attack method to generate natural and
robust 3D adversarial examples in the physical world against point cloud recognition models. The
-ISO attack improves the naturalness of the 3D adversarial example by constraining it to be
-
isometric (see Definition 1) to the original one, which guarantees the consistency between the
intrinsic geometric properties of two 3D objects [
8
]. We theoretically demonstrate that Gaussian
curvature (see Definition 2) can be used to provide a sufficient condition to ensure that two surfaces
are
-isometric. Due to the computable and differentiable nature of Gaussian curvature, we adopt it
as a new regularization loss to practically generate natural 3D adversarial examples. To improve the
robustness of 3D adversarial examples under physical transformations, we further propose a maxima
over transformation (
MaxOT
) method that actively searches for the most harmful transformations
rather than random ones [
1
] for optimization. Armed with Bayesian optimization that provides better
initialization of the transformations, MaxOT is able to find a set of diverse worst-case transformations,
leading to improved performance of the 3D adversarial examples in the physical world.
We conduct extensive experiments to evaluate the performance of our method on attacking typical
point cloud recognition models [
49
,
50
,
69
]. Results demonstrate that, in comparison with the alter-
native state-of-the-art attack methods [
64
,
70
,
89
],
-ISO attack achieves higher success rates, while
making the generated adversarial examples more natural and robust under physical transformations.
A physical-world experiment is conducted by 3D-printing the adversarial meshes and re-scanning the
objects for evaluation, which also validates the effectiveness of our method.
2 Related work
Deep learning on 3D point clouds.
Deep 3D point cloud recognition [
49
,
21
,
75
,
77
,
82
,
51
,
62
]
has emerged in recent years with various applications in many fields, such as 3D object classifica-
tion [
56
,
38
,
84
,
87
], 3D scene segmentation [
22
,
68
,
78
,
26
], and 3D object detection in autonomous
driving [
98
,
79
]. One of the pioneering works is PointNet [
49
], which directly applies a multilayer
perceptron to learn point features and aggregates them in an efficient way using a max-pool module.
PointNet++ [
50
] and a large number of later works [
13
,
44
,
81
] are built on PointNet to further
capture fine-grained local structure information from the neighborhood of each point. Recently, some
works have focused on designing special convolutions on 3D domains [
2
,
40
,
45
,
63
] or developing
graph neural networks [18,53,54,69] to improve point cloud recognition.
3D adversarial attacks.
Following the previous studies on adversarial machine learning in the 2D
image domain [
60
,
35
,
4
,
10
,
19
,
83
,
11
,
12
], many works [
74
,
3
,
42
] apply adversarial attacks to the
2
3D point cloud domain. Xiang et al. [
74
] proposed point generation attacks by adding a limited number
of synthetic points to the point cloud. Recently, more studies [
71
,
94
] use gradient-based attack
methods to identify key points from the point cloud for deletion. More point perturbation attacks [
24
,
46
,
92
,
9
] learn to perturb the xyz coordinates of each point through a C
&
W framework [
4
] based
on metrics defined in the Euclidean space. Zhao et al. [
93
] attack by the isometric transformations
in the Euclidean space such as rotation. It is worth noting that we consider isometric mappings
between surfaces, which is essentially different from [
93
]. Later works [
36
,
88
] further apply iterative
gradient methods to achieve more advanced adversarial perturbations. Besides, other works consider
generative models [
97
], 3D data attacks [
65
,
58
], adversarial robustness [
90
,
59
], attacks against
LIDAR [
37
,
30
], autonomous driving [
57
,
91
], backdoor attacks [
39
,
76
], etc., in the 3D domain.
However, the existing attacks on 3D point cloud recognition are still far from stealthy and the only
three methods that consider the physical-world attacks [
64
,
70
,
89
] are not very effective. In this
paper, we surpass the performance of previous methods by proposing a novel
-isometric (
-ISO)
attack method to generate natural and robust 3D adversarial examples in the physical world.
3 Methodology
We now formally present
-ISO attack
. We first present the general problem formulation, and
then describe how
-ISO attack enhances the imperceptibility and robustness of the generated 3D
adversarial samples, respectively.
3.1 Problem formulation
To generate 3D adversarial objects in the physical world, it is more straightforward to perturb the mesh
representation of 3D objects rather than point clouds [
89
] since the reconstruction process can incur
large errors [
64
,
70
]. A mesh
M= (V,F)
is an approximate shape representation of its underlying
surface, where
V:= {vi}nv
i=1
is the set of
nv
vertices of
xyz
coordinates, and
F:= {zi}nf
i=1
is the set
of
nf
triangle faces represented by the indices of vertices. We let
S
denote a differentiable sampling
process such that
P:= S(M)∈ X
is the point cloud obtained by randomly sampling on the mesh
surface, where
X
is the set of all point clouds. We let
y∈ Y
denote the corresponding ground-truth
label of Mas well as P.
In this paper, we focus on the challenging targeted attacks against deep 3D point cloud classification
models [
49
,
50
,
69
]. Given a point cloud classifier
f:X → Y
, the goal of the attack is to generate
an adversarial mesh
Madv = (Vadv,F)
for the original one
M
with vertex perturbations such that
the sampled point cloud
Padv := S(Madv)
will be misclassified by
f
as the target class
y∗(6=y)
.
In general, the perturbation should be small to make the adversarial mesh
Madv
inconspicuous
under human inspection. Thus, the optimization problem of generating the adversarial mesh can be
generally formulated as
min
Madv Lf(S(Madv), y∗) + β· R(Madv,M),(1)
where
Lf
is the loss that facilitates the misclassification of
Padv
to
y∗
,
R
is the regularization term
that minimizes a perceptibility distance between
Madv
and
M
, and
β
is a balancing hyperparameter
between these two losses. In this paper, we try to develop a stealthy and robust attack method by
proposing a new regularization loss
R
based on Gaussian curvature with theoretical guarantees to
remain the naturalness as well as a new attacking loss
Lf
to enhance the robustness of the generated
3D adversarial objects under physical transformations.
R
and
Lf
will be introduced in the following.
3.2 -ISO attack
Most of the existing 3D adversarial attacks only consider the constraints
R
defined in the Euclidean
space [
15
,
82
,
23
]. The generated adversarial examples have noticeable point outliers that cause
spikes to appear on the object’s surface, thus losing the naturalness. Moreover, the outliers are more
easily removed and defended against. The main reason is that the existing methods do not consider
the geometric properties of the 3D objects. In differential geometry, isometric mapping guarantees the
consistency of the intrinsic geometric features of two objects [
8
]. Therefore, we propose a constraint
loss
R
based on
-isometric mapping to restrict the naturalness of 3D adversarial objects. We first
give the definition of -isometric below.
3

(a) Original (b) KNN & Geo3(c) Mesh Attack (d) -ISO
Figure 2: An illustration of
-isometric attack. (a): Original mesh. (b) and (c): Adversarial meshes generated
by KNN &
GeoA3
attack and Mesh Attack, respectively. They consider only the constraints defined in the
Euclidean space, and the curve lengths (shown as the black curves) of the generated adversarial examples differ
significantly from those of the original samples, which do not satisfy
-isometric and lose naturalness. (d):
Adversarial mesh generated by
-ISO. We consider the geometric features of 3D objects and constrain the 3D
adversarial example to be
-isometric to the original one, such that the curve lengths of the generated adversarial
samples vary little and have naturalness.
Definition 1.
Let
S
and
˜
S
denote two surfaces of
R3
. A diffeomorphism
ϕ:S→˜
S
is called an
-isometric mapping if there exists a constant
n
such that it takes any local curve
C
in
S
to a curve
˜
C=ϕ(C)
in
˜
S
satisfying
(1 −n)s(C)< s(˜
C)<(1 + n)s(C)
where
s(·)
is the length. The
surfaces Sand ˜
Sare then said to be -isometric.
As shown in Fig. 2, Fig. 2(a) is the original mesh, Fig. 2(b) is the adversarial mesh generated by KNN
attack and
GeoA3
attack, and Fig. 2(c) is the adversarial mesh generated by Mesh Attack. These
three methods only consider the constraints defined in the Euclidean space, and the curve lengths of
the generated adversarial samples differ greatly from those of the original samples, which are not
-isometric and lose naturalness. Fig. 2(d) is the adversarial mesh generated by our proposed
-ISO
attack. We consider the geometric features of 3D objects to generate natural adversarial examples by
constraining them to be
-isometric to the original examples (i.e., the curve length of the resulting
adversarial examples varies very little). However, it is intractable to directly optimize the adversarial
mesh to be
-isometric as the original one. Therefore, we give the definition of the Gaussian curvature
of the surface from [8].
Definition 2.
Let
S
be a surface of
R3
parameterized by
r:= r(u, v)=[x(u, v), y(u, v), z(u, v)]
,
where
(u, v)∈R2
. We let
ru,rv
denote the partial derivatives of
r
w.r.t.
u
and
v
,
ruu,ruv ,rvv
denote the second partial derivatives of
r
, and
∧,h·,·i
denote the outer product and inner product,
respectively. The parametrization thus defines unit normal vectors
n:= ru∧rv
|ru∧rv|
of the surface
S
. We
denote the eigenvalues of the coefficient matrix of the Weingarten map
L M
M N E F
F G −1
as
k1
and
k2
, where
E=hru,rui
,
F=hru,rvi
and
G=hrv,rvi
are coefficients of the first
fundamental form and
L=hruu,ni
,
M=hruv,ni
and
N=hrvv,ni
are coefficients of the second
fundamental form. The Gaussian curvature is defined as K=k1k2=LN−M2
EG−F2.
Remark 1.
The Gaussian curvature intrinsically measures the bending degree of the surface reflected
by the Gaussian mapping. Let the area element of the surface
S
be
dA =hru∧rv,nidudv
and the
area element under the Gaussian mapping
g:S∈R3→S2
r(u, v)→n(u, v)
be
dA0=hnu∧nv,nidudv
.
From nu∧nv=Kru∧rv(proof in Appendix D), we obtain
lim
D→P
Area (g(D))
Area (D)= lim
D→PRg(D)dA0
RDdA = lim
D→PRDKdA
RDdA =K(P).(2)
Eq.
(2)
illustrates that the geometric meaning of Gaussian curvature is the ratio of the area of the
domain at the point
P
on the surface
S
and the area of the domain at the corresponding point under
the Gaussian mapping, i.e., the bending degree of the surface reflected by the Gaussian mapping.
Based on Definitions 1and 2, we have the following theorem.
Theorem 1
(proof in Appendix A)
.
Let
S
and
˜
S
denote two surfaces of
R3
;
ϕ:S→˜
S
denote a
diffeomorphism that takes a point
v
in
S
to point
v0=ϕ(v)
in
˜
S
; and
K(·)
be the Gaussian curvature
of the points. If |K(v)−K(v0)|< for any point v, then the surfaces Sand ˜
Sare -isometric.
4

Theorem 1indicates that to make two surfaces
-isometric, one can constrain their Gaussian curvatures.
Since the Gaussian curvature is computable and differentiable w.r.t. vertices, we adopt it to constrain
the naturalness of 3D adversarial meshes as
RGauss (Madv,M) = 1
nvX
v∈V,v0=ϕ(v)∈Vadv
kK(v0)−K(v)k2
2,(3)
where
ϕ(·)
is the corresponding mapping between vertices in
V
and
Vadv
. We follow the Gauss-
Bonnet formula [7] to calculate the Gaussian curvature of the vertices as
K(v) = 2π−Pi∈N(v)θi(v)
A(v),(4)
where
A(·)
is the area of the vertex neighborhood, i.e., the area of the polygonal region joined by the
consecutive midpoints of triangles incident on the vertex of interest,
N(v)
is the set of faces containing
v
, and
θi(v)
is the interior angle of the face at vertex
v
. Note that the value of
Pi∈N(v)θi(v)
for a
plane is
2π
and the Gaussian curvature is
0
. The more curved the surface, the smaller the value of
Pi∈N(v)θi(v)and the larger the Gaussian curvature.
In addition, we prevent the generated adversarial meshes from self-intersecting by using the Laplace
loss [
16
], denoted as
RLap (Madv)
, which represents the distance between a vertex and its nearest
neighbor’s center of mass, and the edge length loss [
67
], denoted as
Redge (Madv)
, which represents
the smoothness of the surface. Thus, the overall regularization term can be expressed as:
R(Madv,M) = λ1· RGauss (Madv,M) + λ2· RLap (Madv) + λ3· Redge (Madv),(5)
where λ1,λ2and λ3are balancing hyperparameters.
3.3 Improving the robustness under physical transformations
Besides concerning the naturalness of 3D adversarial examples, we further enhance their robustness
under physical transformations, such as 3D rotations, affine projections, cutouts, etc. A common
method is the expectation over transformation (EOT) algorithm [
1
], which optimizes the adversarial
example over the distribution of different transformations. However, it is still challenging to maintain
the attacking performance under various physical transformations. As shown in the experiments, after
using the EOT algorithm, there are still some transformations that the generated adversarial examples
are not robust to, leading to a reduction of the attack success rate.
To address this issue, our key insight is to consider the worst-case transformations rather than their ex-
pectation, since if the adversarial examples are resistant to the most harmful physical transformations,
they can also resist much weaker transformations, inspired by adversarial training [
47
]. Therefore,
we propose a
maxima over transformation (MaxOT)
algorithm to actively search for physical
transformations that maximize the misclassification loss. The loss function
Lf
is thus formulated as:
Lf(S(Madv), y∗) = max
T∗⊂T
Et∈T∗Lce (t(S(Madv)), y∗),(6)
where
T
contains all possible transformations,
T∗
is a subset of transformations in
T
, and
Lce
is the
cross-entropy loss. Note that in Eq.
(6)
we consider a subset of transformations
T∗
rather than a
single one because the loss landscape w.r.t. transformations is largely non-convex and contains many
local maxima [
14
]. Thus we aim to find a set of diverse worst-case transformations. By integrating
Eq.
(6)
into Eq.
(1)
, it forms a minimax optimization problem, where the inner maximization aims
to find physical transformations that maximize the cross-entropy loss, while the outer minimization
aims to optimize the adversarial example with the worst-case transformations.
3.3.1 Bayesian optimization
To solve problem
(6)
, we search for the worst-case transformations one by one. Given an initialized
transformation, we perform gradient-based optimization to update the transformation parameters
(e.g., angles for rotations). However, randomly selecting initialized transformations is ineffective
since the random initialization may drop into regions of weak transformations, which limits the
exploration of the space of all transformations. To address this issue, we propose to adopt the
Bayesian optimization [17,55] to better break the dilemma between exploration and exploitation to
find more appropriate initialized transformations.
5

摘要:
展开>>
收起<<
Isometric3DAdversarialExamplesinthePhysicalWorldYiboMiao1,YinpengDong2;3y,JunZhu2;3;4;5,Xiao-ShanGao1y1KLMM,UCAS,AcademyofMathematicsandSystemsScience,ChineseAcademyofSciences,Beijing100190,China2Dept.ofComp.Sci.&Tech.,InstituteforAI,Tsinghua-BoschJointMLCenter,THBILab,BNRistCenter,TsinghuaUniversit...
声明:本站为文档C2C交易模式,即用户上传的文档直接被用户下载,本站只是中间服务平台,本站所有文档下载所得的收益归上传人(含作者)所有。玖贝云文库仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对上载内容本身不做任何修改或编辑。若文档所含内容侵犯了您的版权或隐私,请立即通知玖贝云文库,我们立即给予删除!
相关推荐
-
公司营销部领导述职述廉报告VIP免费

 2024-12-03 15
2024-12-03 15 -
100套述职述廉述法述学框架提纲VIP免费
 2024-12-03 16
2024-12-03 16 -
20220106政府党组班子党史学习教育专题民主生活会“五个带头”对照检查材料VIP免费
 2024-12-03 13
2024-12-03 13 -
20220106县纪委监委领导班子党史学习教育专题民主生活会对照检查材料VIP免费
 2024-12-03 16
2024-12-03 16 -
A文秘笔杆子工作资料汇编手册(近70000字)VIP免费
 2024-12-03 13
2024-12-03 13 -
20220106县领导班子党史学习教育专题民主生活会对照检查材料VIP免费
 2024-12-03 16
2024-12-03 16 -
经济开发区党工委书记管委会主任述学述职述廉述法报告VIP免费
 2024-12-03 55
2024-12-03 55 -
20220106政府领导专题民主生活会五个方面对照检查材料VIP免费
 2024-12-03 21
2024-12-03 21 -
派出所教导员述职述廉报告6篇VIP免费
 2024-12-03 20
2024-12-03 20 -
民主生活会对县委班子及其成员批评意见清单VIP免费
 2024-12-03 63
2024-12-03 63
分类:图书资源
价格:10玖币
属性:22 页
大小:2.99MB
格式:PDF
时间:2025-05-05